Using a Color Sorter to Remove Sticks from Mechanically Harvested Red Chile1
New Mexico Chile Task Force Report 20
Ryan Herbon, G. H. Abernathy and M. Siddaiah
College of Agricultural, Consumer and Environmental Sciences, New Mexico State University
Authors: Respectively, Agricultural engineer, New Mexico Chile Task Force and the Manufacturing Technology and Engineering Center (M-TEC), College of Engineering, New Mexico State University, Las Cruces, N.M. New Mexico Chile Task Force consulting engineer and professor emeritus, Department of Civil Engineering, New Mexico State University, Las Cruces, N.M. Engineer, USDA, ARS Southwestern Cotton Ginning Research Laboratory, Las Cruces, N.M.
Introduction
During the 2002 and 2003 chile harvesting seasons, the New Mexico Chile Task Force (CTF), in cooperation with NMSU’s Manufacturing Technology and Engineering Center (M-TEC) and the U.S. Department of Agriculture, Agricultural Research Service (USDA, ARS) Southwestern Cotton Ginning Research Laboratory, tested color sorters for efficiency in removing sticks from mechanically harvested red chile. The inability to remove all sticks from harvested material has been a major hurdle in the widespread adoption of mechanical harvesters for the crop. Particularly difficult is the removal of sticks with physical characteristics similar to chile pods.
During the 2002 chile harvest season, a Woodside Electronics Company (WECO) color sorter was tested on a small scale to determine the initial feasibility of the color sorting process. During the 2003 season, researchers tested three off-the-shelf color sorters from two companies, WECO and Odenberg Engineering. The machines tested had been designed for use in the tomato industry, where they were used to separate green tomatoes from red tomatoes. Following the 2003 harvest season, researchers at the USDA, ARS Cotton Ginning Research Laboratory tested the WECO machine using additional sorting parameters. Testing procedures and results provided useful information about the removal of sticks from red chile, even if the desired results were not achieved. This paper outlines the testing procedures and the test results during the 2002 and 2003 growing seasons in Doña Ana County, New Mexico.
Background
All color sorters tested used Pulsed Light Emitting Diode (LED) technology to determine the color of material falling from the edge of a belt. Pulsed LED technology flashes different wavelength LEDs and receives the reflection of each wavelength off the material being scanned. Colors are differentiated based on the ratios between the different wavelengths. The processor in each machine then sends a signal to a solenoid air valve to open the valve, which actuates a plastic reject finger. The reject finger diverts the target material from its natural trajectory into a separate bin or onto a separate conveyor belt. The reject fingers provided with the WECO machine were 4.5 inches long; those provided with the Odenberg machines were 9 inches long.
For 2002 testing and the post-harvest 2003 USDA, ARS testing, a 40-inch wide WECO field unit tomato sorter (Golden Streak) was borrowed from local growers, Joel Tellez and Robert Sondgeroth. For the 2003 harvest testing, WECO sent a 32-inch wide version of the Golden Streak. Field units are machines used on tomato harvesters, as opposed to plant units, used in the processing plants. Odenberg sent two different machines for testing in 2003, a 40-inch field unit (GM-40) and a 40-inch plant unit (FM-40). The FM-40 differed from the GM-40 in that it offered a different selection of possible wavelengths for use in the decision ratios, and it had a faster processor and higher price.
2002 Color Sorter Testing
During the 2002 chile harvest season, researchers tested the WECO color sorter using 20 batches of machine-harvested chile. The material was harvested from the NMSU Leyendecker Plant Science Research Center on Dec. 10, 2002, using a Boese mechanical harvester. The chile variety tested was ‘B-18’ and the harvesting occurred after the first freeze. Tests were conducted during a one-week period, Dec. 12-19, 2002, to ensure that test material would have consistent physical properties.
All of the 2002 tests targeted red chile pods for separation, letting the sticks and discolored pods pass. Researchers chose this method because attempting to target the stick color would have caused the pods to be rejected with the sticks since their stems are the same color as sticks.
Due to the small scale of 2002 tests, results were based on individual counts instead of material weights. Researchers counted each pod, stick and discolored pod after it traveled through the sorter; they noted the side of the reject divider to which each was diverted. The small batches were run through the color sorter at a very slow feed rate that was not recorded.
Ideal results would have been to have 100% of the pods on the accept side of the divider and 100% of sticks and discolored pods on the reject side. Test results showed that the machine was able to reject 91.7% of the sticks with a 3.7% standard deviation. It removed 88.9% of the discolored pods with a standard deviation of 8.2%. This was accomplished while losing 11.1% of marketable pods, with a standard deviation of 3.6% (fig. 1).
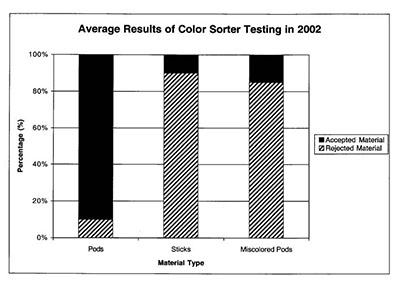
Figure 1. The average results of testing the color sorter in 2002.
In testing the color sorter, some of the pods that were kicked toward the “accept” side of the divider remained with the rejected material. This was due to varied trajectories and the fingers not solidly kicking all of the “accepted” pods. The majority of acceptable pods that were “rejected” were smaller than average.
A machinery problem occurred during testing. Three of the solenoids that controlled the reject fingers malfunctioned, causing reject fingers to be inoperable on three, 1-inch sections.
2003 Color Sorter Testing
The results of the 2002 testing prompted researchers to test the color sorting concept further in 2003. Throughout the 2003 chile harvest season, each of the three color sorters (WECO Golden Streak, Odenberg GM-40 and Odenberg FM-40) was tested for efficiency. The test bed, built by M-TEC, was designed to do a finish clean on the material initially cleaned by the CTF card cleaner. Data were collected to test the efficiency of the color sorters related to the feed speed from the draper. The draper is the apparatus that regulates the flow of material into the system. This was done after it was noted that the color sorters all had near 100% efficiency when run at very slow feed rates (i.e. one pod or stick at a time).
University researchers and representatives from each company decided that the sorters should be set up to look for and separate red pods. Because each pod has an attached stem that is the same color as the sticks that are being removed, identifying and attempting to separate sticks would lead to removal of pods as well. By configuring the machine to identify and separate pods, it was understood that any pods that have attached sticks will be kicked with the pods, because the machine would see the red and kick it, taking the attached stick with it.
Testing was done by setting each color sorter to its optimum electronic setting by running individual pods and individual sticks. The machines were programmed so that they would kick each pod that went over the edge of the belt, while ignoring each stick. These electronic variables were not included in the testing regimen because each of the three machines being tested had vastly different settings. The number of settings varied from 15 to 50, depending on the machine. To fully explore all of these variables in thoroughly designed experiments would take more time than is available during one chile harvesting season.
Samples from each machine were collected from the “accepted” material (which should have been all pods) and from the “rejected” material (which should have been all sticks). The samples were then sorted into three categories and weighed. The categories were pods, sticks and undesirable pods. Undesirable pods were those that were badly discolored. Data collected on pods with attached sticks were not used in results because it was understood that the color sorters would be ineffective at removing this type of trash. Percentages were obtained on stick trash removed and pods lost (the percentage of acceptable pods not diverted from the product stream). It was decided that dry weight didn’t factor into the testing since the percentage of accepted pods to rejected pods was taken at the same point of the harvest.
Data collection was hindered by several factors. A major limiting factor of the 2003 data collection was that the color sorter variable being tested (feed speed) was not the same variable as that being tested by the CTF card sorter. The color sorter also was not capable of running at the same feed rate as the card cleaner. These two factors made it impossible to run data collection tests on the card cleaner and the color sorters simultaneously. Therefore, the color sorters were able to be tested, at most, one day per week.
The other major testing hindrance was the modifications of the draper feeder throughout the season by other researchers to adjust it for card cleaner testing. The draper was modified by cutting the draper feed limiting fingers shorter, adjusting the draper finger gap and by changing the motor gearing. Because of this, a draper feed motor speed of 1,000 rpm early in the season resulted in a very different feed rate than a speed of 1,000 rpm late in the season and made it impossible to correlate feed rate data, as was the intention of the testing.
2003 results
After the initial testing, it was determined that the 9-inch long reject fingers of the Odenberg sorters were inadequate for the type of sorting being attempted. The longer fingers kicked too large a stream of material when actuated and, therefore, kicked too many sticks onto the pod side. This resulted in very low pod loss but also very poor stick removal results. After consulting with Odenberg representatives, the fingers were cut off to 4.5 inches long, the same length as the standard-size reject fingers made by Odenberg.
The Odenberg GM-40 color sorter was not used for any of the data collection trials. Researchers working with the Odenberg representative determined that the machine’s software did not allow the necessary wavelength ratios to be used to differentiate the pods from the sticks. The representative felt that the machine was physically capable of doing the work, but that re-writing the software would be required. Software rewriting could be done by Odenberg if they were to receive orders for color sorters for this application and would provide a more cost-effective solution than the FM-40 machine. Because the software rewriting would be a significant undertaking for the Odenberg engineers, only the Woodside Electronics Golden Streak and the Odenberg FM-40 were used for data collection trials. Odenberg representatives believe that with the re-write of the software that the GM-40 would yield very similar results to the FM-40.
Because of the problems encountered in the testing, accurate correlation of feed speed to cleaning effectiveness could not be determined. Instead, the average results are listed from each machine at all feed speeds. There was no statistically significant difference between the different brands of machines used in the tests.
The 2003 test results are summarized in fig. 2. The Woodside Golden Streak and the Odenberg FM-40 color sorters were able to remove 73.2% of the sticks from the sample, with a standard deviation of 13.8%. They were able to remove 71.6% of the discolored pods, with a standard deviation of 23%. The stick and discolored pod removal came at the expense of pod loss. The color sorter rejected an average of 9.8% of the pods with a 3.9% standard deviation. These test results were obtained at feed speeds ranging from 1,000 lbs/hr to 10,000 lbs/hr. Typical commercial processing plants run approximately 40,000 lbs/hour.
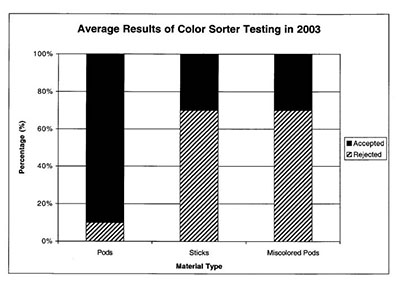
Figure 2. Average results of color sorter testing in 2003.
2003 test conclusions
Color sorter testing during 2003 yielded results closer to what may be expected in an actual chile processing plant application than the tests conducted in 2002. The machines were able to clean the chile material very effectively, yet they did so at a significant loss (approximately 10%) of marketable chile pod material. Such pod loss makes the color sorters unacceptable for this application. Another drawback to the machines was that they were not able to keep up with the feed speed required at chile processing plants. At least four 40-inch wide color sorters would be required to handle the 40,000 lb/hr feed rate at commercial chile plants, resulting in a significant financial investment.
Reclaiming pods
During the 2003 harvest season, additional uses for the color sorters were explored. One use was to reclaim chile pods that were lost during other cleaning processes, in particular, the small trash discarded by the CTF card cleaner. When 10 boxes of chile (4-foot x 4-foot x 4-foot, containing approximately 1,000 lbs of material) were run through the card cleaner, two boxes of trash were removed. When this trash material was run through the color sorter, approximately one box of marketable pods was reclaimed. The reclaimed box was of approximately the same trash content as the original material being fed into the card cleaner. The color sorter was not able to reclaim all of the pod material that was rejected from the card cleaner.
2003 USDA experiments
Since color sorting had shown much promise when first attempted, a WECO Golden Streak unit was borrowed from a local grower to do further testing to demonstrate the potential of color sorting in the cleaning of red chile. For example, researchers were interested in whether the color sorter could separate green stems from chopped red chile peppers or jalapeños. As received, the machine was set to kick red objects out of a stream of green products. Since USDA researchers wanted to kick off-color product out of red product, the control boards were returned to the factory to be reprogrammed.
Cleaning red chile by kicking the sticks
In the limited time available, only preliminary trials were possible. Three color adjustments were found to be important: color (red vs. green), sensitivity (size of color spot) and dirt (allows a spot to exist on a red object). Among the infinite combinations available, only a few that appeared to work were tested. The machine rejected 80 to 100% of medium-sized sticks in five samples. However, only 60 to 85% of pods were accepted. Pod rejection appeared to occur when the color sorter saw the stem end of the pod which was brown rather than red. This was true also for broken and bruised pods. Some discolored pods were rejected as well as those in very close physical proximity to sticks. A few red pods were rejected for no apparent reason.
Rejected material included a combination of sticks and pods. Note that some of the rejected pods are off-color. The number of rejected pods is probably unacceptable to the processing industry. Accepted pods represent a very clean sample because, for this sample, no sticks were accepted.
Green stems versus chopped red peppers or jalapeños
For this test, a sample of red jalapeños was purchased at the grocery store and cut with scissors into segments about 1-inch long. The pods were bright red but the stems were fully green. Three pods were left whole to evaluate size effect.
These samples were fed through the color sorting mechanism at a speed of 125 ft/min. No combination of color sorting adjustments could be found that rejected the green stems while accepting the red pod segments. Size of red objects had no observable effect.
These minimal tests indicate that the green stems may be too small to be detected by the color sorting sensors on this machine. A potential user would need to work closely with the color sorter manufacturer to ensure that the machine could be programmed to accomplish the job.
Conclusion
Based on the results of the tests, color sorting using off-the-shelf tomato sorting machines has limited application in removing stick trash from mechanically harvested red chile. The process of using color sensors showed very positive results, but specific machines each had limitations. The fact that the pulsed LED technology can differentiate between pods and sticks may become a future initiative for trash removal mechanisms. However, research needs to be done to identify better reject mechanisms. The current reject mechanism of pneumatically actuated fingers cannot handle the throughput required by processing plants, nor does it work effectively with the varied shapes and trajectories of the trash/chile mixture. This is especially evident when machines are programmed to reject the chile pods, which are the majority of the material in the stream, as opposed to the sticks, which are the minority.
1This article was reviewed by Anthony Hyde, associate professor, Department of Engineering Technology, and Wes Eaton, engineer, Manufacturing Technology and Engineering Center (M-TEC), New Mexico State University, Las Cruces, N.M. and Ed Hughs, research leader, USDA, ARS Southwestern Cotton Ginning Laboratory, Las Cruces, N.M.
For further reading
CTF-26: Good Agricultural Practices: What Growers Should Know
https://pubs.nmsu.edu/research/horticulture/CTF26/index.html
CTF-27: Red Chile Pod Reclaimer Evaluations
https://pubs.nmsu.edu/research/horticulture/CTF27/index.html
CTF-28: Chile Machine Harvesting Trials
https://pubs.nmsu.edu/research/horticulture/CTF28/index.html
To find more resources for your business, home, or family, visit the College of Agricultural, Consumer and Environmental Sciences on the World Wide Web at aces.nmsu.edu
Contents of publications may be freely reproduced for educational purposes. All other rights reserved. For permission to use publications for other purposes, contact pubs@nmsu.edu or the authors listed on the publication.
New Mexico State University is an equal opportunity/affirmative action employer and educator. NMSU and the U.S. Department of Agriculture cooperating.
September, 2005, Las Cruces, NM