Chile Machine Harvesting Trials1
New Mexico Chile Task Force: Report 28
George Abernathy, S. E. Hughs and Carlos B. Armijo
College of Agricultural, Consumer and Environmental Sciences, New Mexico State University
Authors: Respectively, New Mexico Chile Task Force consulting engineer and professor emeritus (gha@totacc.com), Department of Civil Engineering, New Mexico State University; research leader (shughs@nmsu.edu), and textile technologist (carcarmijo@nmsu.edu), USDA, ARS Southwestern Cotton Ginning Laboratory, Mesilla Park, N.M.
Introduction
During the 2005 chile season, a series of harvester trials was conducted to determine the effects of machine adjustments and speed on the efficiency of conventional open-helix picking bars (fig.1) and less widely used rubber-finger picking bars (fig. 2). Efficiency was measured in terms of ground and plant losses (i.e., the pods remaining on the ground and on the plants at the completion of the harvesting operation). Pod damage and stick content of the harvested sample are also reported.

Figure 1. Traditional open-helix picker bars with plywood feeler gauges in place to set a 1.0-inch spacing.
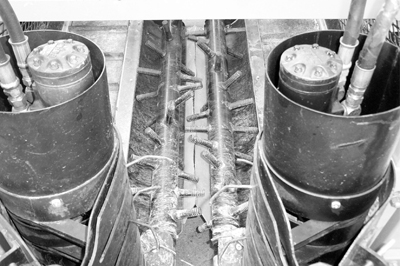
Figure 2. Rubber-finger picker bars evaluated during the 2005 season.
All open-helix trials were conducted at the New Mexico State University Leyendecker Plant Science Research Center (LPSRC) in Las Cruces. The variety harvested was proprietary but resembled the familiar 'B-18.' The first planting succumbed to disease early in the season and was replanted on June 9. This late planting created problems for testing because the pods did not turn red until very late in the season. However, the plants grew quickly after emergence and produced few pods close to the ground. To encourage upright plant growth, the plots were minimally thinned to clumps of one to three plants every 6 inches. The upright habit and higher pod set are characteristics desirable for machine harvest (fig. 3). At the time of the open-helix test (pre-frost), pod moisture averaged 80 percent and stick moisture, 65 percent.

Figure 3. Rubber-finger picker test plot after frost. Note upright plant habit and high pod set. Open-helix test plot is plowed under in the foreground.
The rubber-finger picker was tested at LPSRC and at Curry Seed Farm in Pearce, Ariz. The first trial, at LPSRC, was conducted on green chile; the second, at the Curry farm, was run on four different red varieties; and the final trial, at LPSRC, was conducted in the same field and on the same variety as the open-helix tests. However, the third trial was conducted one week later than the open-helix tests and after frost, when the pods averaged 79 percent moisture and the sticks, 55 percent.
Open-helix tests
The variables evaluated in the open-helix test were helix-bar spacing (distance between the bars), helix rotational speed and forward speed of the harvester. The helix-bar spacings tested were 1.5, 1.0 and 0.5 inches. To set the spacing accurately, 0.5-inch thick paddles (feeler gauges) were placed between bars as adjustments were made (fig. 1). One paddle was used to set 0.5-inch spacing, two for 1.0-inch spacing and three for 1.5-inch spacing. Helix rotational speeds of 300, 400 and 500 rpm were chosen because they are typical of machines operating in the field. Forward speeds of 1.0 and 1.5 mph were evaluated.
Data collected consisted of pod ground and plant losses each reported as a percentage of total pods in the field by weight. Damaged pods are the percent of pods in the harvested sample, again by weight. Sticks are percent of the total weight of the harvested pods.
To test three helix-bar spacings, three helix-bar rpms and two forward speeds would require 18 plots; to make duplicate runs of each test point would require 36 plots. As only 30 plots were available, the 300-rpm test at 1.5 mph was eliminated. Therefore, the test data for the 300-rpm tests contain only half as many data points as data for the other speeds tested.
The effect of helix-bar spacing on ground loss is depicted in fig. 4. Data categories annotated with the same letter are not significantly different at the 5 percent level. Ground loss decreased significantly as helix rotational speed increased. The 500-rpm speed was better than 400 rpm, which was, in turn, better than 300 rpm. Helix spacing had no significant effect on ground loss. There appears to be a tendency toward higher losses at closer spacings but the data are too variable to reach a conclusion. Forward speed had no apparent effect on ground loss. In fig. 4, losses of 15 to 20 percent are not acceptable whereas losses of 5 to 10 percent are probably inevitable for mechanical harvesting. Generally, ground losses were much greater than plant losses as has previously been observed in the field (Abernathy and Hughs, 2006).
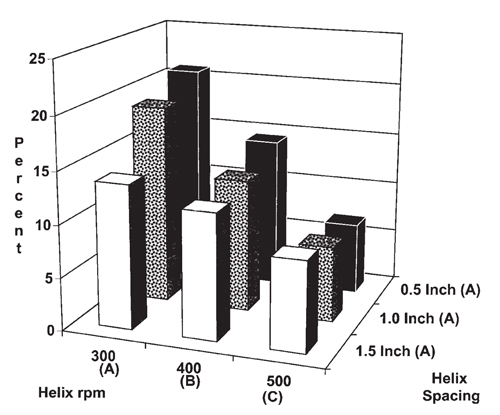
Figure 4. Effect of helix-bar spacing and rotational speed on ground losses. Letters indicate significant differences.
The effect of helix rotational speed and spacing on plant loss is shown in fig 5. Plant losses were affected variably by speed. The least losses were seen at 500 rpm and the worst at 400 rpm, with losses at 300 rpm being between these two. The effect of spacing is more obvious; the 1.5-inch spacing resulted in the highest plant loss while there was no significant difference between the 1-inch and 0.5-inch treatments. There was no observable effect of forward speed on plant losses in the range of speeds tested.
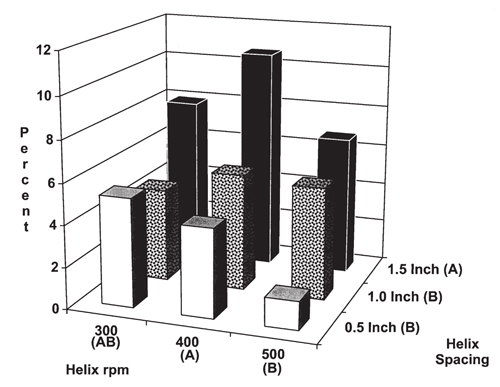
Figure 5. Effect of helix speed and spacing on plant losses.
The effect of helix rotational speed and bar spacing on pod damage is shown in fig. 6. None of the variables tested had a significant effect on pod damage but the data do show some trends. At the narrow opening of 0.5 inch, pod damage decreased with higher rpm, a finding that seems counter intuitive. However, at both 1.0-inch and 1.5-inch openings, pod damage increased dramatically at the higher rotational speeds. Thus, the cost of cleaning all pods from the plants probably includes some increase in pod damage, but the data here is inconclusive.
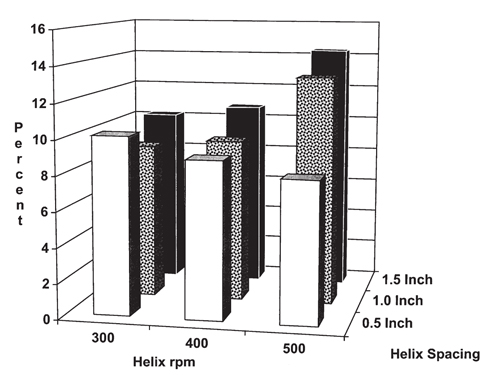
Figure 6. Effect of helix speed and spacing on harvester losses for a helix-picker pod damage.
A significant problem in mechanically harvested red chile is the stick content of the sample. The effect of helix spacing and rotational speed on the stick content of harvested red chile is shown in fig. 7. Stick weight is expressed as a percent of total sample weight, and it appears to be minimal because sticks are very light as compared to pods. The worst samples contained almost two percent sticks, which would be unacceptable for most processors.
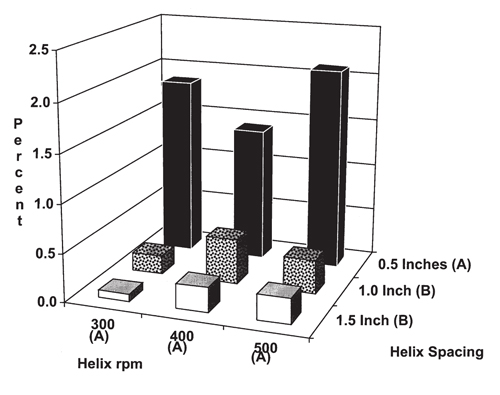
Figure 7. Effect of helix speed and bar spacing on stick content of harvested chile.
There were small differences among samples picked using 1.5-inch and 1.0-inch helix spacings at all rotational speeds. There was a significant increase in stick content for samples harvested with a 0.5 inch-helix spacing. With values between 1.5 and 2.0 percent, the samples would appear to have excessive sticks. There seemed to be a minor increase in stick content at higher helix speed, but the effect was small compared to the effect of the 0.5-inch helix-bar spacing. Forward speed had no observable impact on the percent of sticks in the harvested samples.
Decreasing the opening between bars and increasing rotational speed both reduce plant losses although the data were quite variable. Ground loss tended to increase with narrower helix openings but decreased significantly with higher rotational speed. Pod damage tended to increase with both higher speed and diminished helix opening, however, the results were not significant. Contamination by sticks was exacerbated significantly at the 0.5-inch helix opening compared to the 1.0-inch and 1.5-inch spacings. The narrow forward-speed range tested caused no significant differences in the variables evaluated.
Rubber-finger picker bar tests
To allow evaluation of rubber-finger picker bars (fig. 2), widely used in New Mexico's Pecos Valley, Jim McClendon donated a pair for testing during the 2005 harvest season. The fingers were about 3.25-inches long and about 0.75-inch in diameter. They were mounted on 2.75-inch tubing for a length of three feet. Opposite pairs were spaced 3.0 inches apart along the tube with each succeeding pair rotated 30 degrees to form a spiral. These bars were mounted on 0.75-inch shafts and installed on the one-row Boese harvester that is used for machine harvesting tests at LPSRC. Geometry of the picker head dictated that the picker shafts be mounted in the plane of the conveyors rather than above them. Troughs were placed below the finger shafts, but loss of pods down through the plant slot was a recurring problem.
The first trial of the finger-picker bars was conducted at LPSRC and was an attempt to harvest green pods in late August. The field was an early planting that had been ravaged by disease so the stand was sparse, with large gaps in crop rows. Also the gap between the picker bars, newly installed on the harvester, proved to be excessively wide. These factors led to an unacceptably high ground loss so that only observational data were collected. A photo of the picked row is shown in fig. 8. The rubber-finger picker bars appeared to be quite adept at removing pods from the plants without excessive damage to pods or plants. The harvester was subsequently fitted with flexible rubber seals along the plant slot, which diminished the ground loss but did not eliminate it.

Figure 8. A machine-harvested row of green chile showing pods lost on the ground from finger-picker bars.
The second trial of the finger-picker bars was conducted at the Curry farm in Pearce, Ariz. The machine was operated on four chile varieties, only one of which was judged suitable for mechanical harvest. It was a low-growing, upright plant with little fruit near the ground and few pods in the plant's interior. No numerical data were collected, but it appeared that 90 percent or more of the pods were delivered to the pallet box without an excess of sticks. In one high-yielding variety having large plants with dense foliage, the machine was unable to operate at all.
The final adjustment tests were performed at the LPSRC in mid-November. The test was conducted in the same field as the open-helix tests, on the same variety of chile. However, frost occurred between the tests, which meant that the pods appeared to have lost much of their turgidity. It was anticipated that pod damage would be high, but the test numbers were very comparable to the open-helix test results.
Since the finger shafts had troughs built under them, it was not possible to change the shaft spacing. A 7-inch spacing was constant. This resulted in a 2.5-inch overlap of the fingers. The two bars were timed such that opposite fingers were 90 degrees out of phase. Shaft rotational speeds were the same as those used in the helix tests (300, 400 and 500 rpm). Forward speeds were 1.0 and 1.5 mph.
The effect of operating speeds on ground losses is depicted in fig. 9. Ground loss was excessively high for all rotor and forward speeds, but no significant trends were evident. The only reason noted for high losses was that some pods were observed being thrown out of the front of the picker head.
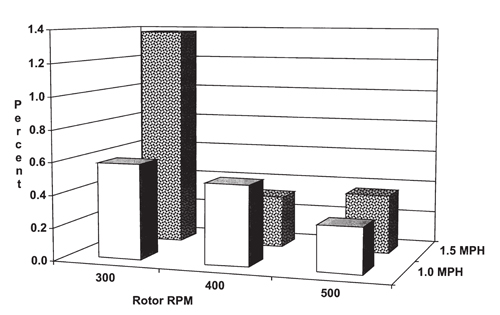
Figure 9. Effect of finger-picker rotor speed and forward speed on ground losses.
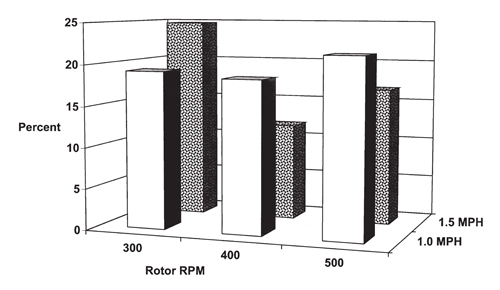
Figure 10. Effect of finger-picker rotor speed and forward speed on plant losses.
The rubber fingers left very few pods on the plants. For all speeds other than 300 rpm at 1.5 mph, the loss was less than one-half percent. The high value at 300 rpm and 1.5 mph was caused by one very high reading that we believe to be experimental error. Neither rotor speed nor forward speed had a significant effect on plant loss.
Pod damage is depicted in fig. 11. It increased by about 30 percent as rotational speed was increased from 300 to 500 rpm. Damage at 300 rpm was significantly less than that at 400 or 500 rpm. The range of damage values was from 7 to 11 percent which is similar to, or slightly less than, those reported for the open-helix evaluation. That is a surprising result, considering the fragile appearance of the post-frost pods. Forward speed had no effect on pod damage at any rotor speed.
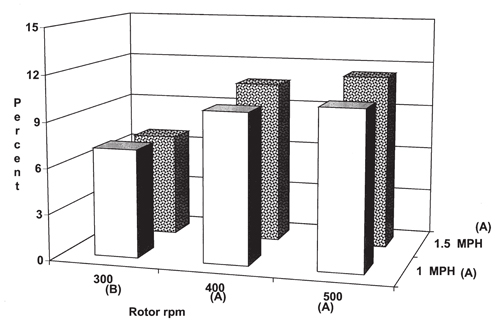
Figure 11. Effect of finger-picker speed and forward speed on pod damage.
Stick content of the harvested samples is depicted in fig. 12. Values range from about 2 percent to almost 5 percent, which is much higher than those for the open-helix tests except the 0.5 inch spacing (fig. 7). There appears to be an increase in stick content at higher rotational speeds but the differences are not significant. For forward speed, the stick content increased significantly at 1.5 mph compared to 1.0 mph. The high stick content may have been exacerbated by the one-week delay with the occurrence of frost that resulted in stick moisture decline from 65 percent to 55 percent.
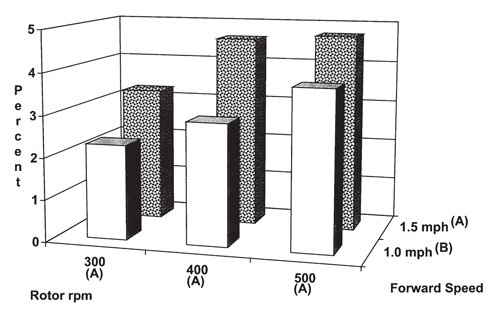
Figure 12. Effect of finger-picker rotor speed and forward speed on stick content of harvested samples.
In this test we were unable to define the variables controlling ground and/or plant losses. Pod damage increased with rotor speed but forward speed had no effect. Stick content increased with both rotor speed and forward speed. More research is recommended before rubber-finger picker shafts are more widely applied in the industry.
Conclusion
The preliminary tests reported here are a starting point for further evaluation. Data were collected for two machines that operated in the same field under similar crop conditions at a single point in the season. It would be a great service to the chile industry if a testing program could evaluate machine adjustment and operational variables at different times of the season and under various field conditions.
Some specific recommendations can be made on the basis of these results. Helix spacing is critical. Wide spacing (1.5 inches) tends to leave pods on the plant, whereas narrow spacing (0.5 inches) causes excessive sticks in the harvested sample. High rotational speeds (500 rpm) reduced both plant and ground losses but resulted in higher pod damage than lower speeds (300 and 400 rpm). Generally, ground speed had a minor effect for the range tested (1.0 to 1.5 mph). There was a small but non-significant increase in both plant and ground losses for the open-helix machine at the higher ground speed and a significant increase in stick content for the rubber-finger picker. Pod damage was almost identical at the two speeds.
References
Abernathy, G. and S. E. Hughs. (2006, January). Chile Machine Harvesting Observations - 2004, New Mexico Chile Task Force Report #24, New Mexico State University, Las Cruces.
Footnotes
1This paper was reviewed by Roy Pennock, program coordinator, New Mexico Cooperative Extension Service; Ryan Herbon, agricultural engineer, New Mexico Chile Task Force and the Manufacturing Technology and Engineering Center (M-TEC), College of Engineering; both at New Mexico State University, Las Cruces; Chris Wilson, senior member, Technical Staff, Intelligent Systems and Robotics Center, Sandia National Laboratories, Albuquerque, N.M.; and Derek Whitelock, agricultural engineer, USDA, ARS Southwestern Cotton Ginning Laboratory, Mesilla Park, N.M. (back to top)
To find more resources for your business, home, or family, visit the College of Agricultural, Consumer and Environmental Sciences on the World Wide Web at aces.nmsu.edu
Contents of publications may be freely reproduced for educational purposes. All other rights reserved. For permission to use publications for other purposes, contact pubs@nmsu.edu or the authors listed on the publication.
New Mexico State University is an equal opportunity/affirmative action employer and educator. NMSU and the U.S. Department of Agriculture cooperating.
August 2006