Improving Chile Harvesting and Cleaning Technologies
New Mexico Chile Task Force Report 6
Jon R. Salton and Chris Wilson
College of Agricultural, Consumer and Environmental Sciences, New Mexico State University
Authors: Senior members, Technical Staff, Intelligent Systems and Robotics Center, Sandia National Laboratories, Albuquerque, N.M.
Introduction
This report’s purpose is to recommend to the New Mexico Chile Task Force possible ways to increase chile industry productivity by applying various technologies to improve mechanized harvesting and cleaning processes. Both passive mechanical and active/guided methods are considered. After reviewing our suggestions, the task force may enlist the aid of Sandia National Laboratories (SNL) to develop any of the proposed ideas.

Figure 1. 'Sonora' chile plant at harvest exhibits erect plant structure and a variety of pod characteristics.
Machine Harvesting Recommendations
Chile pods come in a range of shapes, sizes, colors, densities and moisture contents, all of which greatly complicate harvesting. This is true both for harvesting by hand and machine. However, present machine-harvesting methods produce much more waste, on average, than do hand-harvesting methods. (Waste is defined as any part of the plant other than the chile pods.) In addition to variations in the pods, different plant structures and characteristics affect how well the pods can be harvested from the plants. It is much more difficult to harvest pods from a plant with low, wide-reaching branches that allow the chiles to set close to or on the ground than from a tall, stout plant with short branches that keep the pods well off the ground. Fruits on low-growing branches often are not picked up by the harvesting mechanism and are dropped to the ground as waste. ‘Sonora’ plants tend to stand fairly tall and stout (fig.1), making this variety a good candidate for machine harvesting. However, the wide range of pod sizes, shapes and colors on the plants during harvest pose challenges for separating marketable pods from nonmarketable pods and waste. Some of the fruits are soft and supple with enough moisture content to make them significantly heavier than the plant’s branches and leaves. Others are dry and hard, weighing about as much as a leaf and making it difficult to differentiate mechanically between fruit and trash. In addition, ‘Sonora’ pods tend to be more difficult to remove from the plant than pods of other varieties. In general, a waste content of less than 10% and an in-field chile loss of less than 20% is acceptable with present mechanical-harvesting methods. However, even these goals are not always met. The need for improvement is evident, although not necessarily easily obtained.
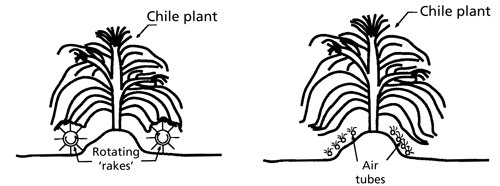
Figure 2. Methods for lifting chiles up before entering the harvester.
Suggestions for existing harvesters
Machine harvesters designed to date operate with one of two different picking mechanisms. The first type uses two helixes or spirals that strip the fruits from plants and drop them onto a moving conveyor belt that takes them to a holding container. This type is known in the industry as a double-helix system. The second type has overlapping fingers that move along the plants to strip the pods. Both types do an adequate job of removing the chiles from the plants. However, they also remove significantly more waste from the plants than is desirable.
Rotational speed control versus forward rate. By watching double-helix systems in field operation, we made two basic observations. The first deals with the rotational speed of the harvesting mechanism relative to the forward motion of the picking machine. In one instance, the rotational speed of the helixes appeared to be too slow. The chiles were pulled from the plant by the forward motion of the machine rather than by the turning of the helix. In another instance, the opposite was true. The helixes rotated so rapidly that the machine pulled nearly every branch and leaf from a plant before it moved on to the next plant. In both cases, a significant amount of waste was harvested with the fruits. Tying the two motions together, in a way similar to that in which a grass turf aerator synchronizes its forward motion with the rotating speed of the aeration tines, would improve the efficiency of the double-helix system. Synchronizing the helixes’ rotation and harvester machine speed might minimize the stress on the plants’ branches and leaves, while effectively picking the chiles. It also would help minimize the operator input required to control the machine.
Lifting the fruit off the ground. The second observation was that the branches of certain plants tend to droop close to or even touch the ground. In these cases, the harvesting machine has difficulty lifting the fruit high enough to effectively guide it into the picking mechanism. As a result, a significant number of pods are torn from the plants and drop on the ground. Lifting the chile pods before they enter the machine could be accomplished by placing horizontal rollers with tines in front of the machine. The rollers could be rotated to rake the low-lying branches off the ground (fig. 2). Another possibility is to place multiple rows of tubes with holes close to the ground on either side of the row being harvested. Compressed air could be blown out the holes to lift the plants off the ground before they enter the machine (fig. 2). In addition to eliminating the chile waste left in the field, this might help position the branches to better handle the force of having the pods torn from them, resulting in fewer branches and leaves being picked with the pods.
Alternative methods for machine harvesting
After observing two different double-helix systems operate, we noted that the approach angle of the double helix to the plant, the helixes’ turning speed and the noncompliance of the picking interface all seem to contribute to the amount of waste picked with the chile pods. The following suggestions for alternative methods are based on these observations. It is not known how extensively (or if at all) either method has been investigated.
Compliant rake. One problem observed is the lack of compliance in the picking mechanisms. When plants become bound in the picking mechanism, the mechanism begins to pull branches from the plants rather than letting go and grabbing on again. A possible solution is to use a compliant-rake-finger-type system (fig. 3).
Conveyor belts would carry the harvested pods away from the rake system. The degree of compliance in the rake fingers and the speed at which they rotate would require testing. However, this type of system could be more effective at reducing the amount of waste picked with the chile pods.
Active/guided picking. All of the mechanical harvesting methods discussed previously are open-loop systems. The machine moves along a row of plants, performing a continuous operation. Due to the nature of the plant and the machine’s motion, chiles are separated from the plant and moved to a collection point. The problem with these methods is that they tend to collect a significant amount of waste along with the chiles.
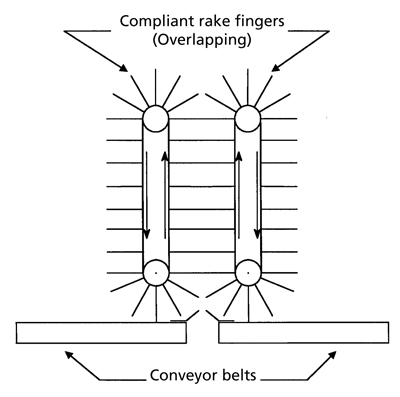
Figure 3. Compliant rake system.
An active or guided harvesting system would incorporate sensors and feedback control to improve the chile-picking process. This setup incorporates a broad range of solutions with varying degrees of complexity, cost, risk and effectiveness. At one extreme is a robotic arm, guided by three-dimensional (3-D) machine vision, that would approach each chile pod, locate the chile/stem junction and snap or cut the chile from the plant. Issues to be addressed in developing such a system include processing speed and crop volume; machine vision discrimination between pod and plant; variability of the pods/plants through harvest stages; 3-D guidance for targeting, grasping and separating the chiles without damaging the pods; and cost/durability of a complex system. At the other end of the spectrum, adding sensors and controls to existing harvesters would allow automatic optimization of harvester settings for varying crop conditions from field to field, row to row or within rows. This system type might be developed simply by adding ground speed and height sensors to control the helix or drum rotation speed and the height of the harvester head. A more sophisticated approach might include vision sensors to monitor the harvested product stream, the approaching plants and/or the harvested plants. It also might incorporate adaptive control schemes that could optimize harvester performance based on numerous sensed parameters and automatic learning algorithms. Numerous possibilities exist between these extremes.
Methods for Removing Waste in the Field
The most important problem that the task force asked SNL to evaluate is how to separate chile pods from waste after mechanical harvest. Chile industry representatives expressed a preference that this task be accomplished in the field before the chiles are transported for processing. Not only would this improve the quality of product sent to the processing plants, but it also would reduce the costs associated with transporting the excess material to the processing plants and the subsequent disposal of the waste. An additional benefit of separating out the waste in the field is that it provides nutrients for next year’s crop.
Separating loose waste
The first objective in the waste separation task is to remove any loose waste not connected to chile pods. Observations made in the field indicate that loose waste mainly consists of small stems and leaves. Most of the remaining larger stems with multiple branches have pods attached to them. It seems logical to remove loose waste prior to removing the waste attached to pods. Although some of the techniques discussed below may have been studied in the past, they might not have been considered extensively or applied in the manner suggested. Our purpose is to identify areas that may warrant further study.
Passive mechanical methods. One of the more challenging aspects of separating red chiles from waste is the fact that red chiles have a wide range of physical characteristics that are considered acceptable. In addition, multiple harvests take place a month or more apart. Viablefruits can be in various stages of ripeness, from plump, dense and succulent to withered and lightweight. The fruit size, shape and surface texture all are affected by ripeness. This makes it difficult to use any single mechanical means to accurately differentiate between the chiles and the waste. A combination of three mechanical approaches may be required: systems approach, winnowing and centrifugal force, and buoyancy separation.
With strictly passive mechanical methods for cleaning chiles, it is best to look at the problem from a systems point of view. In one possible system (fig. 4), material flows from left to right. Immediately after harvest, the product is guided onto the roller table. This table could be almost identical to those already developed, with three exceptions. First, the chile/waste combination could be tumbled onto subsequently lower levels of identical tables to stir the material to help separate out loose waste small enough to fall between the rollers. Meanwhile, loose pods and larger waste with pods attached pass to the next stage. Second, mechanical oscillation or vibration could be added. While it would take empirical testing to verify this assumption, it is anticipated that some type of vertical and/or horizontal oscillation, with a relatively large amplitude and low frequency, would mix the material even more, helping to separate out the loose waste. Finally, a fan or other air source could be added to help mix and separate out the loose waste.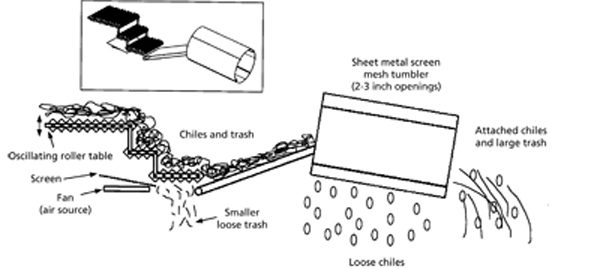
Figure 4. Passive mechanical cleaning system, in-field, post-harvest.
Once past the roller table, the remaining product would then be transported into a large rotating cylindrical drum (fig. 4). The drum skin could be made of thin sheet metal with 2-3 inch oval-shaped cutouts covering its surface. The drum’s interior could have several mixing paddles extending radially inward. As the drum turns, loose chiles would fall through the openings as the paddles tumble and stir the product mixture. At some point along the exterior surface, a cutting blade or scraper might be added to remove any material lodged in the openings of the drum skin. At this point, the mixture should contain only large waste materials, some with chiles attached.
The system shown (fig. 4) is offered as an example of table modification. Alternatively, an oscillating roller table with differently sized and shaped rollers/paddles might be added after the first table to further separate waste from the chiles. Empirical testing would be needed to determine the optimal size and spacing of the rollers and the size and shape of the cutouts in the sheet metal drum.
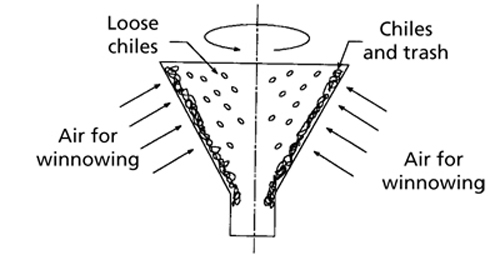
Figure 5. Separating loose chiles using centrifugal force and winnowing.
Other possible methods of separating loose waste from chile pods include winnowing, centrifugal force or a combination of the two. Winnowing consists of tossing or blowing objects into the air to separate items with different characteristics (used extensively in gold mining). Although some of the pods and waste material may have similar weights and densities, their aerodynamic differences may be great enough to separate them. For example, pods have more surface area per pound of mass than do stems. It may be possible to accentuate these differences using centrifugal forces. If the mixture is spun in a cone-shaped, vertical drum with a meshed skin (fig. 5), it might be possible to use air to winnow out the loose waste or pods more easily. These methods alone might not completely eliminate waste mixed with the loose pods. However, used in some combination, they could substantially reduce the amount of waste presently seen.
During a visit to a red chile processing plant in Las Cruces, N.M., we noted that water is being used to transport the waste and chile mixture into the plant. In general, everything (waste and pods of all degrees of ripeness) floated in the water. Through experimentation, it might be possible to find a suitable liquid with a specific gravity (SG) of less than 1.0 (water), in which the pods would float but the waste would sink or vice versa. This may not be possible due to the range of pod densities and possible U.S. Food and Drug Administration (FDA) constraints on using liquids other than water, regardless of their chemical nature. However, most oils (including benign ones like corn oil) have a SG <1.0, so it may be a viable option to pursue.
Active/guided separation. As with the active/guided picking systems, active/guided separation relies on sensor feedback to control the separation process. Machine vision is an obvious sensor choice to distinguish pods from waste. Machine vision techniques will be discussed in more detail in the next section. A vision system mounted above a roller table or conveyor belt could identify pods, their locations and movement speed. A simple up/down picker on a translational bridge traveling perpendicularly to the conveyor (much like a computer printer) would grab each chile as it passed and move it to an adjacent conveyor. However, there are several problems inherent in such a system. If the picked chile is attached to a stem, the stem would go with the chile stream and would need to be separated later. If the picker could not keep up with the stream of chiles, multiple pickers or multiple systems would be needed. If the layer of mixed chile/waste material is deep enough to obscure pods under the waste, the system would not be able to separate the buried chiles. This would suggest multiple systems along the mixed stream so the buried chiles could be exposed as the stream is thinned and turned (e.g., the multilevel table discussed previously).
Separating chiles from attached stems
Once all of the loose chile pods have been separated from the waste, the ideal final in-field process would be to remove the remaining pods from the attached stems. This task is substantially more cumbersome than removing the loose chiles and, therefore, may require a heavier dependence on advanced technologies. However, to begin with, it might be useful to present some potential passive methods of handling this problem. These could then be combined with active systems to achieve the final goal.
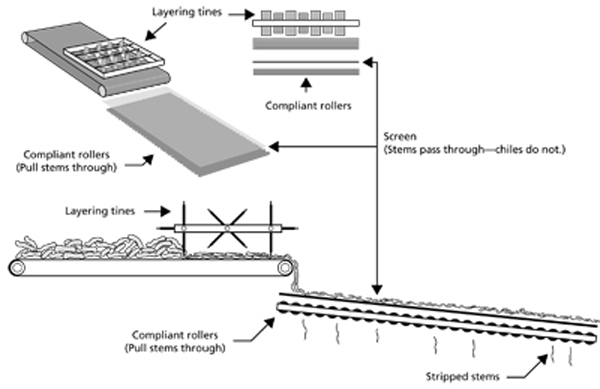
Figure 6. Separating attached chiles from waste—passive method.
Passive methods. The first step needed in this process is to evenly distribute the chile/waste mixture into as thin a layer as possible. For this, a conveyor system moving the product under rotating shafts with fingers, similar to what is presently used in chile-processing plants, would be sufficient. The next obstacle is finding a way to anchor the pods and stems to separate the two. Since the waste stems have a smaller diameter than the pods, it should be possible to sift/shake them through mesh with openings smaller than the diameter of the pods. Once the stems poke through the mesh, they could be grabbed and pulled the rest of the way through, leaving the chiles behind. This could be accomplished by using a series of rotating, compliant roller pairs to grab the stems and pull them through, stripping the chiles and leaving them behind in the process (fig. 6). The compliancy of the rollers could be accomplished by spring loading them at the ends or by making the rollers from a somewhat compliant material (or both). In general, any mechanism (rollers, pinchers or scrapers) capable of grabbing the stems and pulling them through the mesh could be used.
The task of separating stems and pods also might be aided by the use of winnowing and/or centrifugal force. Using the same techniques as described previously, it may be possible to orient the mixture in such a way as to anchor the stems and remove the chiles. Again, empirical testing would be required to validate any of these methods. However, it should be possible to use some combination of these passive techniques to begin collecting the attached chiles.
Active methods. It is unlikely that passive separating methods will separate chiles and stems acceptably. Active selection and manipulating techniques most likely will be required to complete the job. When the stem (waste) is attached to the chile, the cleaning system needs to identify where the two are joined so they can be separated at the correct point. Machine vision might be used to identify this point. The term “machine vision” covers a broad range of methods and capabilities. It implies electronic image capture coupled with computer processing to extract desired information about a scene. In industry, machine vision systems typically are designed for specific tasks. A vision system that guides a robot to pick chiles in the field has different requirements than a system that monitors the product stream to control harvester parameters, which, in turn, has different requirements than a system that locates chile/stem junctions on a conveyor belt. In a chile-picking system, individual chile pods must be identified and each one’s position and orientation in 3-D space determined. In reality, this would take place while many pods are obscured partially by leaves and stems against a background of other chiles, plant material and field textures. At the same time, it would need to account for plant motion, vehicle motion, shadows and ambient lighting variations that are constantly changing. Under controlled lighting conditions, monitoring the harvester’s output stream may require generating only some simple image statistics based on chile-to-waste-to background ratios at relatively slow rates. Locating chile/stem junctions on a conveyor is at least a two-dimensional location problem. It could be very simple with a sparse, single layer of product against a high-contrast background under constant lighting conditions or it could be more complicated with a dense, multilayer product under variable lighting.
A number of commercial machine vision systems exist that can identify and locate assorted, randomly oriented parts on a moving belt. These systems typically rely on consistent geometric features (contrast edges, corners, holes, patterns) and geometric relationships (distances between features) to identify parts. Unfortunately, pods tend to be inconsistent geometrically. Identifying some typical geometries around the stem/chile junction could be useful, but additional features would be needed.
Color is an obvious distinguishing feature for differentiating between red pods and green plants. Working with the color’s hue component could reduce the effects of highlighting and shadowing in the image. There can be a significant variation in “red” associated with the red chiles on a single plant (fig. 1). As the green plant material dries, the contrast between the red pods and the browning plant material decreases. Red is part of the visible light spectrum. There may be other reflected wavelengths outside the visible spectrum—infrared (IR) or ultraviolet (UV)—that distinguish pods from waste where the visible spectrum does not.
Texture is another feature that could help distinguish pods from waste. Chile pods, regardless of whether they are red, green, plump or dry, appear to be smooth and shiny. The waste tends to be wrinkled with a matte surface. Looking for areas of low spatial frequency content coupled with specular (mirror like) highlights could help identify pods of all colors.
The features discussed previously are used to separate or segment an image into regions. Once an image is segmented, extracting size, aspect ratio, area-to-perimeter ratio and other parameters could provide additional differentiating features. Image morphology and blob analysis are standard image processing techniques used for this purpose.
Three-dimensional surfaces, obtained by stereo imaging or structured lighting, for example, could provide differentiating features. These features may prove valuable when intensity or even color images do not provide sufficient contrast (e.g., green pods on green waste, or shadows and variable lighting conditions).
There are a number of methods available to identify and use the differentiating features described previously. Direct methods work well for simple problems. For example, if color equals red, it is chile; if color equals green, it is waste; otherwise, it is background. Here the problem is well understood and the conditions and criteria can be expressed directly. For more complex problems, classical statistical classifiers, such as a Bayesian classifier or weighted nearest neighbor classifier, can work well for large feature sets. Neural networks also have been used successfully to identify and classify features in machine vision systems. Both the statistical methods and neural networks require large training sets of data to establish their rules. They also lend themselves to automated teaching/learning algorithms.
To make this system as effective as possible, the incoming stream of pods with stems should be spread thinly and evenly on the conveyor. This would allow the vision system to isolate the chile/stem junction and prevent a stem cutter from cutting through the stem of one fruit and into the pod of another. It is important not to damage the fruit when removing the stems from chile pods. Therefore, grabbing the pod and the stem separately and pulling them apart is probably not a viable option. Instead, the stems need to be severed from the pods by cutting or snapping them at the base near the fruit. One method might be to use a series of multiple rows of two-degrees-of-freedom (axial and rotational) knife blades. Combined with an effective imaging system, these knife blades could cut the stems guillotine-style. Using multiple rows would ensure that none of the chile pods are missed. A second possible method for removing stems is a two-degrees-of-freedom water knife. The velocity and diameter of the water stream could be designed such that it cuts the stem material without damaging the conveyor system that transports the chiles. Using multiple heads would ensure that the stems are removed from all of the chiles on the conveyor. A third potential method for removing stems is to use a laser knife. Like the proposed water knife, this system could be used with multiple heads and designed not to hurt the conveyor system, while cutting through the chile stem material. However, this system would work only with a laser cutter that could cut through the stem material quickly and cleanly. Once removed, the stems could be separated easily from the pods by any number of passive mechanical means similar to those discussed previously.
Another possible separation method was mentioned briefly in the discussion of active/guided separation. If a two-sided gripper, which extended at least to the end of the chile, grabbed each pod, a quick rotation of the gripper paddle might snap the stem free. Alternatively, the gripper could have a shear at the end that would sever the stem as the gripper closed.
Processing Plant Applications for Green Chile
The final process to be examined is how to handle the chile/waste mixture at the processing plant. This is especially important for green chile processing. At present, green chiles are harvested only by hand because stems must be removed completely for whole chile processing. If some type of in-plant processing methods was used to remove the stems, it would be possible to harvest green chiles mechanically. This alone would reduce operating costs significantly for this segment of the industry. However, this would require the development of new, active, in-plant handling/processing methods. Imaging methods for differentiating chiles from stems and other waste material would be essential. In addition, methods for mechanically removing or cutting the stems from green chiles
need to be addressed.
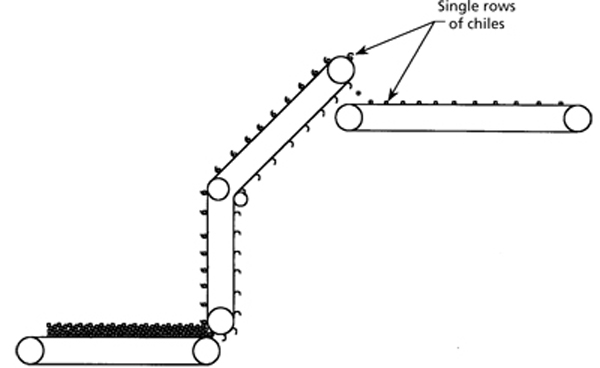
Figure 7. Sorting chiles into rows.
Since green chiles are processed whole, as opposed to being dehydrated and ground into powder, they pose a unique challenge. As mentioned previously, the stems need to be removed at the fruit’s base or attachment point. Assuming that some or all of the methods proposed above could be used effectively to separate the harvested pods from the bulk waste, the next task in the processing plant would be to distribute the green chiles into a consistent, single layer in order to completely remove the stems without damaging the pods. The schematic shown (fig. 7) is one possible way to accomplish this sorting.
Again, some combination of the chile/waste separation techniques discussed previously would need to be implemented before being introduced to the system. From the simplified sketch shown (fig. 7), a conveyor system with small, equally spaced scoops might be used to transport pods, one row at a time, to another conveyor. A system similar to the one shown in fig. 6 could be used as well. In fact, any technique that would spread the chiles effectively into a single layer in preparation for stem removal could be used.
Once spread evenly into a single layer, some type of imaging technology could be used to distinguish between the fruit and the stem material. This active identifying system could be integrated with any viable technique of mechanically removing or cutting the stems, similar to the examples listed earlier. The only difference is that the stems would need to be removed much closer to the chile pods than is necessary for red chiles. As long as this could be accomplished without damaging the pods, the same techniques could be used for both chile types.
The same principles apply to differentiating green chiles from stems that applied to differentiating red chiles from stems. Obviously, the red color feature will not be relevant. However, shape, size, texture and chemical composition are characteristics that could be applied. There also may be some IR/UV spectral features for green chiles that are as distinct as the red color for red chiles.
Hardware/Technology Development Assistance
The final objective of this report is to identify several areas in which SNL has a substantial knowledge base and discuss how these capabilities may be used to help the task force enhance existing technologies and/or develop new technologies for the chile industry. It should be noted that cooperative working arrangements between SNL and universities are common. It may be mutually beneficial for a university faculty member on sabbatical or a post doctoral or graduate co-op student to work at SNL to conduct follow-up work on joint task force/SNL efforts. The knowledge gained from researching vision systems and other active harvesting methods could prove constructive to the agricultural industry in general.
SNL’s Intelligent Systems and Robotics Center has applied computer modeling and simulation to a broad spectrum of industry and government projects in areas including industrial manufacturing, agriculture, weapons and vehicle mobility. Particular areas of concentration are physics and nonphysics-based modeling and simulation, cooperative behavior control schemes, advanced sensor development, and the integration of all of these areas into autonomous vehicle development. In this light, the technical expertise present at SNL could prove to be a valuable asset for developing new ideas and technologies for the chile industry. In addition to its technical expertise, SNL maintains world-class research and development facilities. The robotics center, in particular, has a track record of delivering functional autonomous hardware that meets or exceeds customer requirements and expectations. Using SNL facilities should prove to be invaluable in the search for better automated harvesting and processing techniques in the New Mexico chile industry.
Summary
We toured several chile processing facilities in Las Cruces, N.M., and listened to experts within the industry describe problems faced in developing highly efficient, machine harvesting equipment. Based on these observations and information gathered, a number of possible approaches to developing solutions to machine-harvest problems are suggested. Some proposed solutions are extensions of technologies used in the industry today. With the aid of SNL hardware development, design, modeling and simulation expertise, these ideas could be evaluated in a timely and cost-effective manner. Other proposed solutions, such as new passive mechanical techniques, visual and thermal imaging technologies and active picking and/or selection systems, would require initial validation and verification research. The expertise resident at SNL could be applied to help the chile industry research and develop these ideas. The technical challenges faced by New Mexico’s chile industry are great. However, as this report suggests, there are many avenues of research and development that could be explored to alleviate the problems that have been experienced in automating the industry.
To find more resources for your business, home, or family, visit the College of Agricultural, Consumer and Environmental Sciences on the World Wide Web at aces.nmsu.edu
Contents of publications may be freely reproduced for educational purposes. All other rights reserved. For permission to use publications for other purposes, contact pubs@nmsu.edu or the authors listed on the publication.
New Mexico State University is an equal opportunity/affirmative action employer and educator. NMSU and the U.S. Department of Agriculture cooperating.
March 2003, Las Cruces, NM